← Back to Projects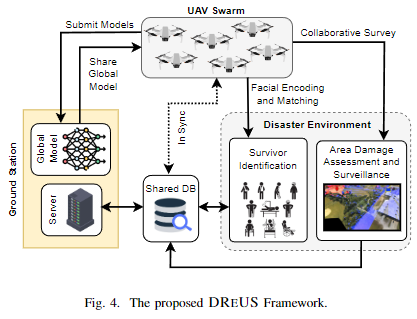 Overview of the DREUS system architecture showing UAV swarm coordination and data flow.
Overview of the DREUS system architecture showing UAV swarm coordination and data flow.
 Visualization of swarm coordination and path planning strategies.
Visualization of swarm coordination and path planning strategies.
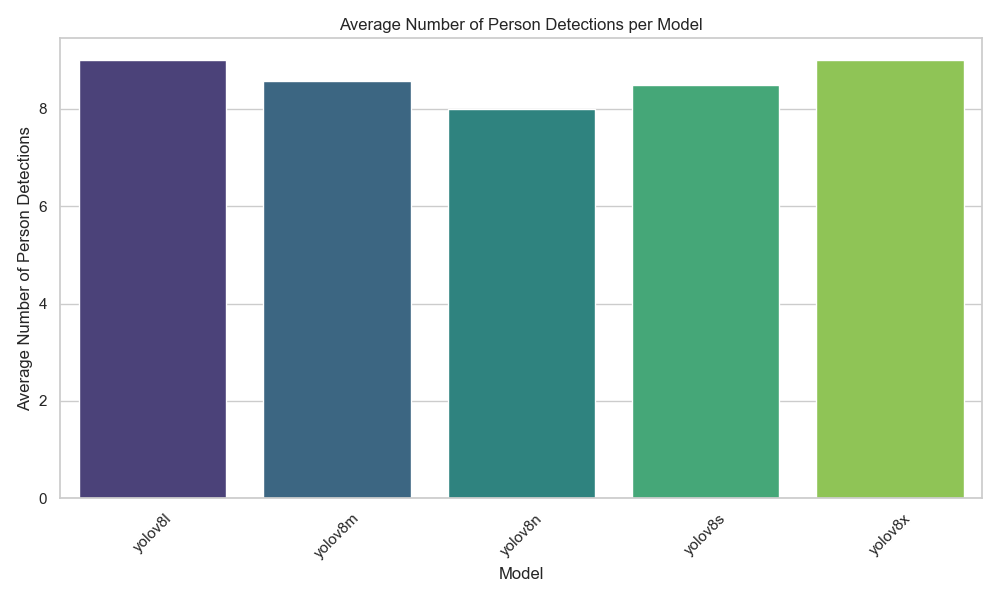 Average detection rates across different model configurations.
Average detection rates across different model configurations.
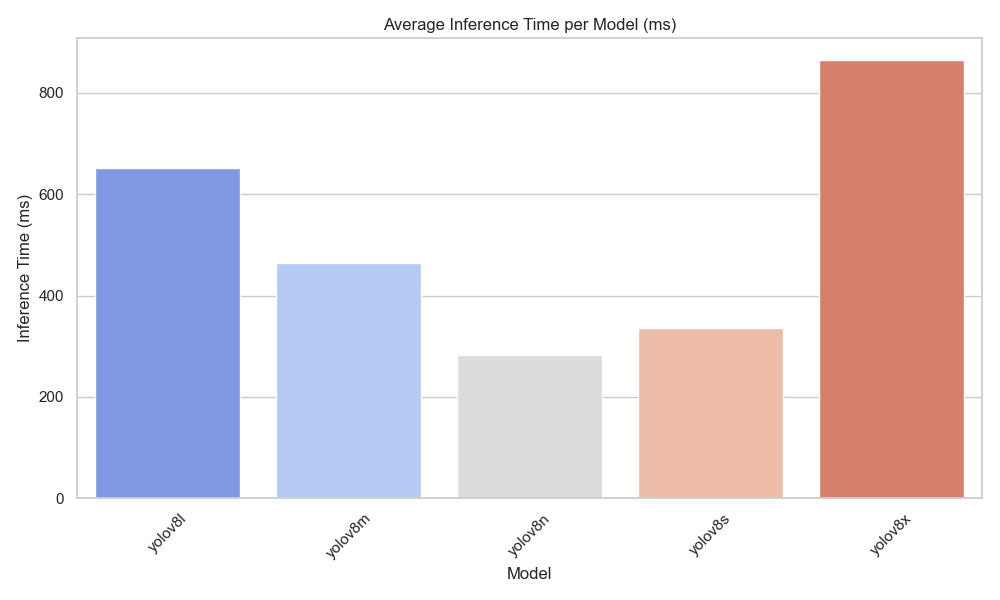 Analysis of inference times across different models and scenarios.
Analysis of inference times across different models and scenarios.
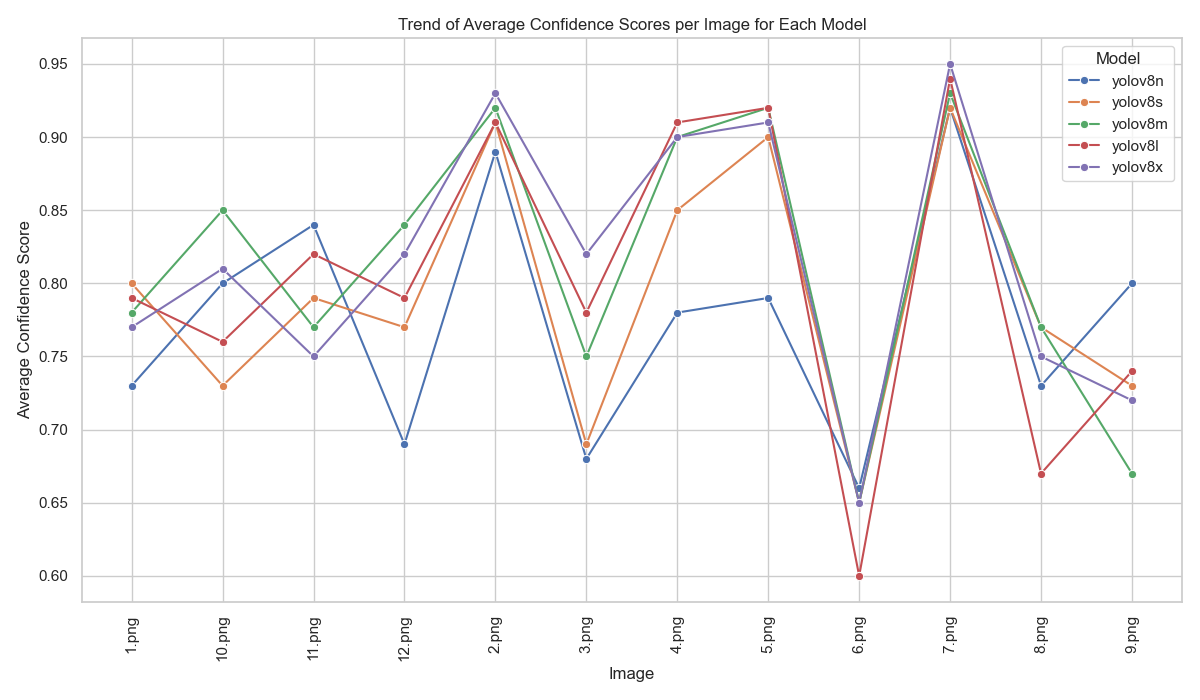
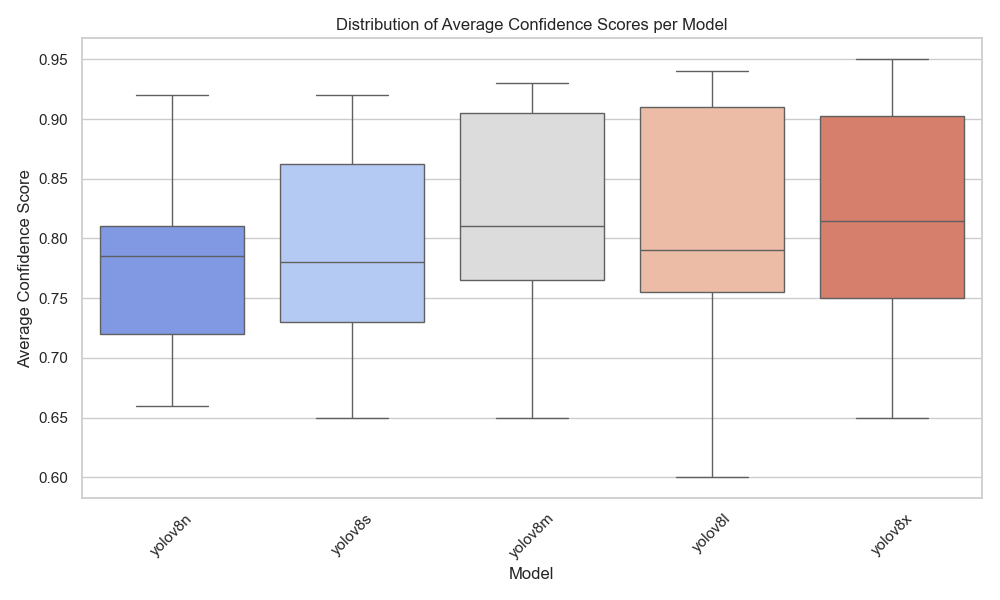 Confidence score distribution across different detection scenarios.
Confidence score distribution across different detection scenarios.
DREUS: Disaster Response Enhanced UAV Swarms
ProfessionalDeep Reinforcement LearningPythonTensorFlowOpenAI GymComputer VisionFederated Learning
Related Papers
DREUS: Disaster Response Enhanced UAV Swarms
Project Overview
DREUS is an advanced disaster response framework that leverages deep reinforcement learning (DRL) to enable autonomous UAV swarms for post-disaster surveillance and survivor assistance. The system integrates facial recognition, emotion detection, and federated learning for collaborative swarm intelligence, ensuring efficient navigation and coordination in dynamic and unpredictable disaster environments.
System Architecture
Core Features
Surveillance & Assistance
- Coordinated UAV swarm surveys
- Advanced survivor identification
- Priority-based assistance allocation
- Real-time environment mapping
Swarm Intelligence
- Shared swarm database
- Redundancy prevention
- Centralized data management
- Collaborative decision-making
Swarm Coordination
Technical Implementation
Deep Learning Components
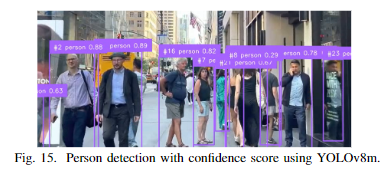
- YOLOv8 for object detection
- Facial recognition systems
- Emotion detection algorithms
- Federated learning integration
Performance Metrics
Our system demonstrates impressive capabilities:
- High accuracy in survivor detection
- Efficient path planning
- Real-time decision making
- Privacy-preserving data sharing
Detection Performance
Inference Analysis
The system's inference capabilities show:
- Fast processing times
- High confidence scores
- Reliable object tracking
- Efficient resource utilization
Inference Times
Model Performance
Our extensive testing revealed:
- Consistent confidence scores
- Reliable detection rates
- Optimal resource usage
- Scalable performance
Confidence Scores
Future Developments
Planned improvements include:
- Enhanced swarm coordination algorithms
- Advanced privacy preservation techniques
- Improved resource optimization
- Extended sensor integration
- Real-world deployment testing
Project Repository
You can find the full project on GitHub.
Project Gallery