← Back to Projects
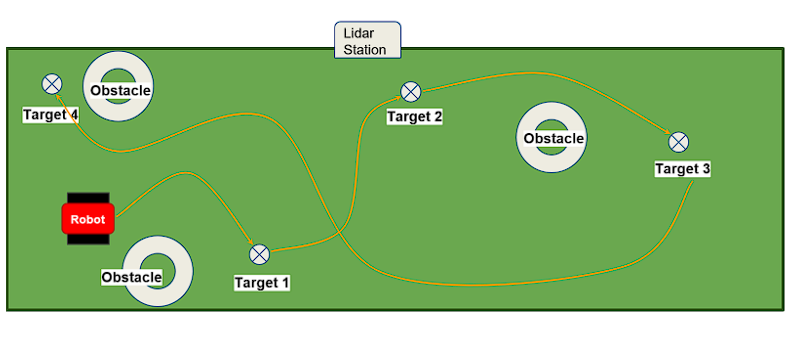 Test course showing the robot's navigation capabilities.
Test course showing the robot's navigation capabilities.
 Main system interface showing sensor data and navigation controls.
Main system interface showing sensor data and navigation controls.
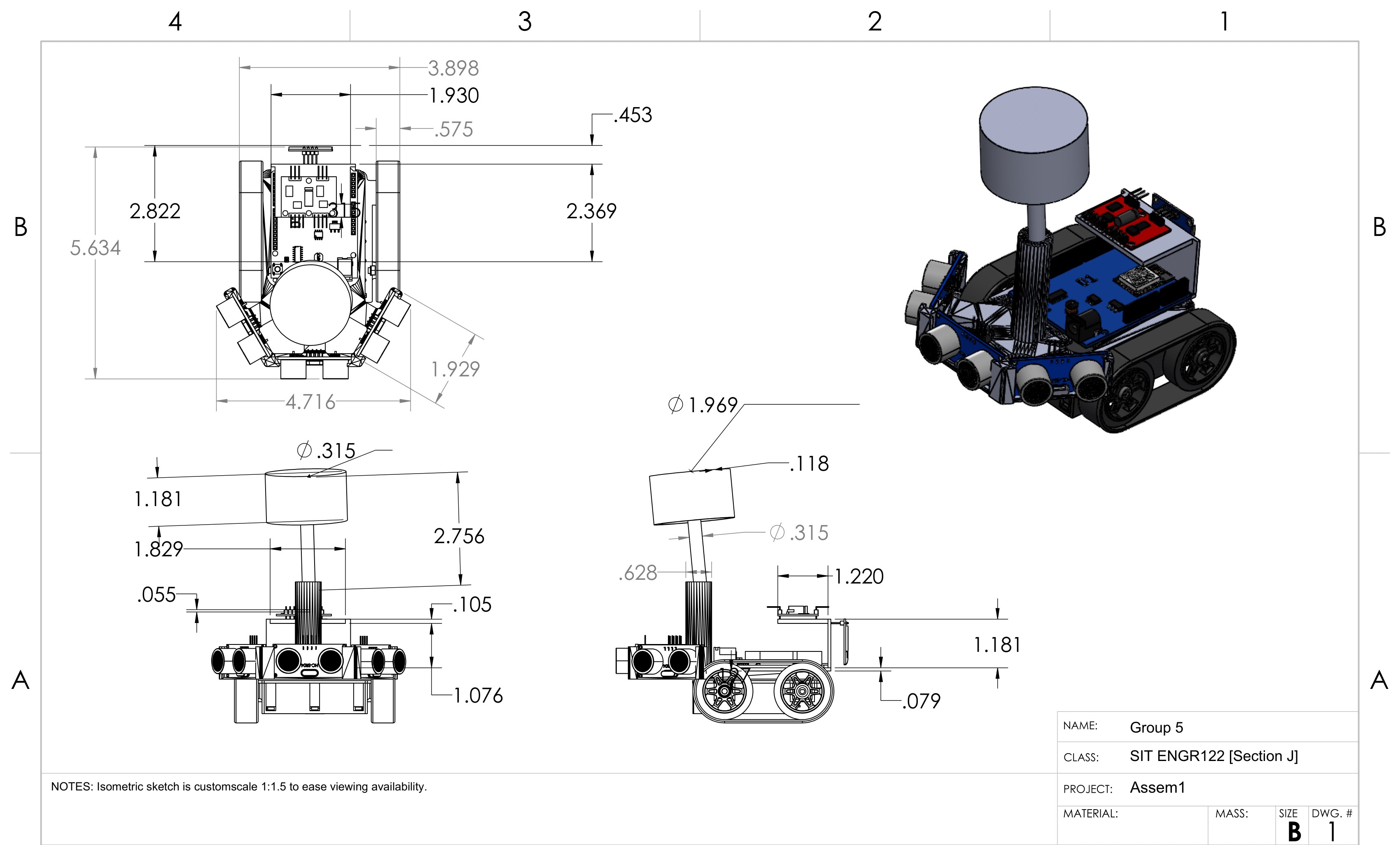 Technical drawing showing the robot's component layout.
Technical drawing showing the robot's component layout.
Lidar-Based Autonomous Navigation Robot
ProfessionalArduinoLiDARSensorsC++3D PrintingRobotics
Lidar-Based Autonomous Navigation Robot
Project Overview
This project focuses on the design and development of an autonomous robot equipped with LiDAR (Light Detection and Ranging) sensors and ultrasonic modules to navigate complex terrains while avoiding unforeseen obstacles. The robot efficiently traverses toward assigned coordinates while dynamically adjusting its path to accommodate real-time environmental changes.
Core Features
Navigation & Sensing
- 360° LiDAR scanning
- Ultrasonic proximity detection
- Real-time obstacle avoidance
- Dynamic path planning
- Position tracking
Navigation Course
Technical Implementation
Hardware Components
- Arduino Uno (Main Processing Unit)
- 360° LiDAR Sensor
- Ultrasonic Sensors (HC-SR04)
- High-Torque DC Motors
- Motor Driver (L298N)
- Servo Motors
System Interface
Software Architecture
- Custom path-finding algorithms
- Sensor data processing
- Real-time mapping
- Motion control system
- Wireless communication
Technical Drawing
Performance Analysis
Testing Results
- 150ms obstacle detection response
- Accurate navigation to multiple targets
- Reliable obstacle avoidance
- Extended operational time
Key Achievements
- Efficient obstacle detection and avoidance
- Successful autonomous navigation
- Real-time environmental mapping
- Robust sensor integration
- Reliable wireless communication
Future Developments
Planned improvements include:
- Enhanced sensor coverage
- Machine learning integration
- Improved path optimization
- Extended battery life
- Advanced mapping capabilities
Project Gallery