← Back to Projects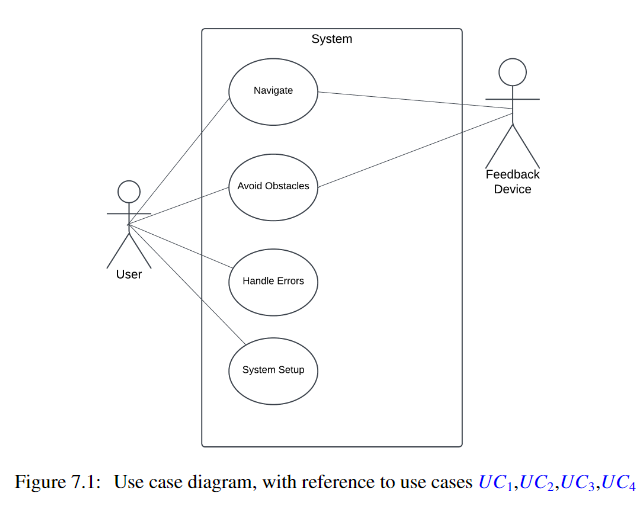 Overview of the C_ALL system architecture and components.
Overview of the C_ALL system architecture and components.
 LIDAR-generated map showing environment detection and obstacle identification.
LIDAR-generated map showing environment detection and obstacle identification.
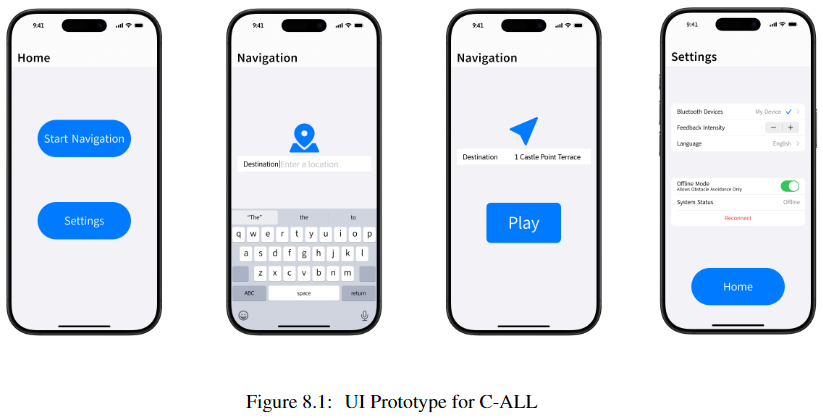
 User interface showing cognitive assistance features and navigation guidance.
User interface showing cognitive assistance features and navigation guidance.
 Detailed view of the sensor integration and data flow.
Detailed view of the sensor integration and data flow.
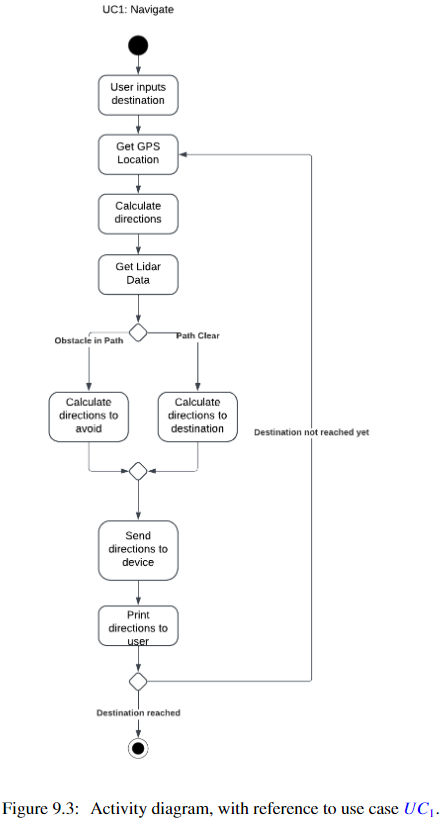
 Navigation system architecture and path planning visualization.
Navigation system architecture and path planning visualization.
 Voice interface system and user interaction flow.
Voice interface system and user interaction flow.
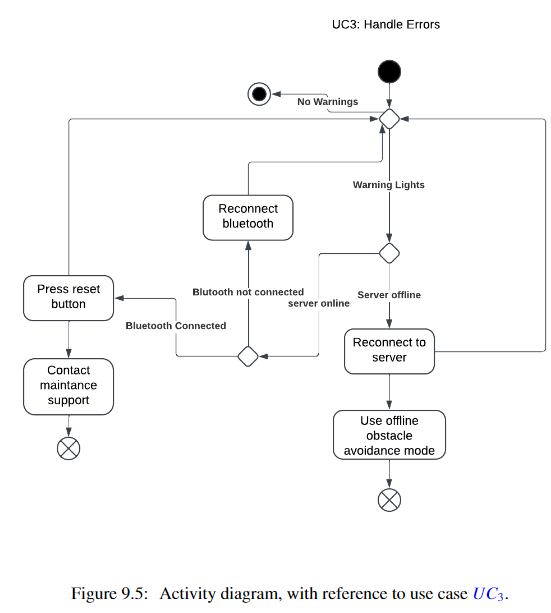
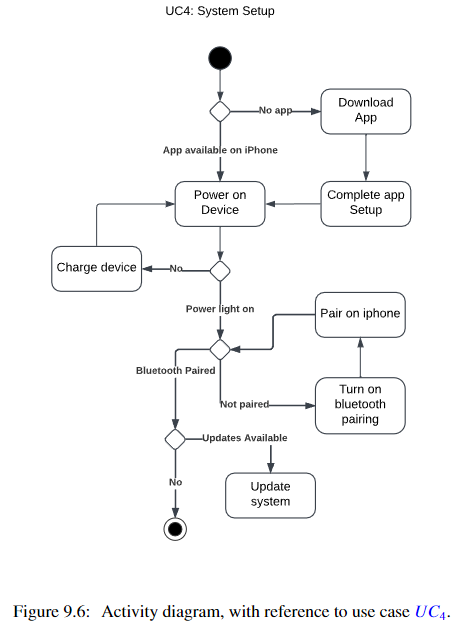
 Overview of safety features and emergency protocols.
Overview of safety features and emergency protocols.
 System performance analysis and optimization results.
System performance analysis and optimization results.
C_ALL: Cognitive Assistance with LIDAR Localization
ProfessionalLIDAR TechnologyROS (Robot Operating System)PythonComputer VisionSensor FusionMachine Learning
Related Papers
C_ALL: Cognitive Assistance with LIDAR Localization
Project Overview
C_ALL is an innovative assistive technology system designed to help visually impaired individuals navigate indoor environments safely and independently. The system combines LIDAR-based localization with cognitive assistance to provide real-time guidance, obstacle detection, and spatial awareness to users.
System Overview
Core Features
LIDAR-Based Localization
- High-precision indoor positioning
- Real-time environment mapping
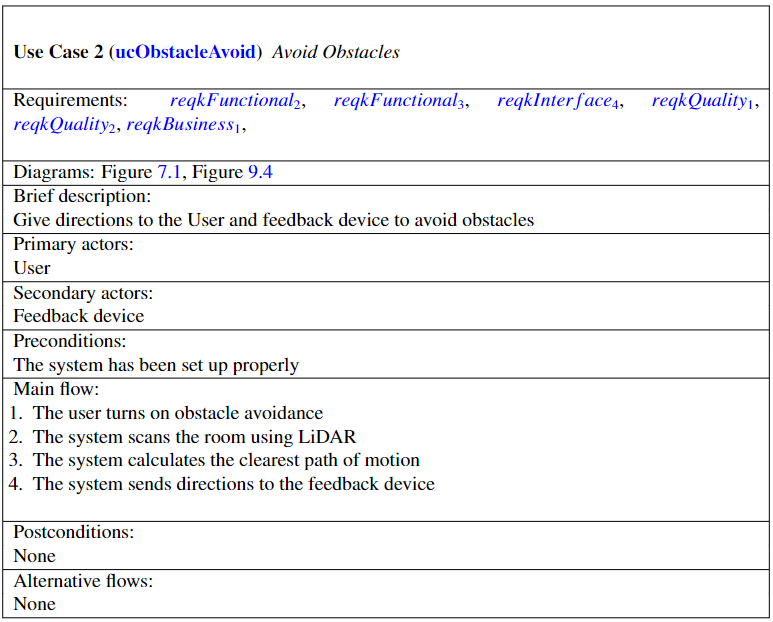
- Dynamic obstacle detection
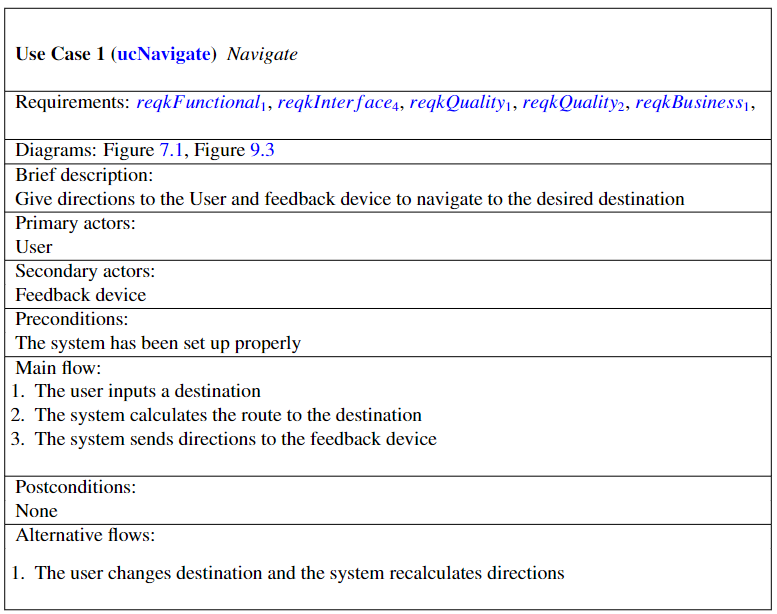
- Path planning and navigation
- 3D spatial awareness
LIDAR Mapping
Cognitive Assistance
- Voice-based navigation guidance
- Contextual environment descriptions
- Obstacle proximity alerts
- Safe path recommendations
- Emergency assistance features
Assistance Interface
Technical Implementation
Sensor Integration
- LIDAR sensor array configuration
- Sensor fusion algorithms
- Real-time data processing
- Environmental mapping
- Position tracking
Sensor System
Navigation System
- Path planning algorithms
- Obstacle avoidance
- Dynamic route adjustment
- User position tracking
- Safety protocol implementation
Navigation System
User Interface
Voice Interface
- Natural language processing
- Context-aware commands
- Real-time feedback
- Emergency protocols
- User customization options
Voice Interface
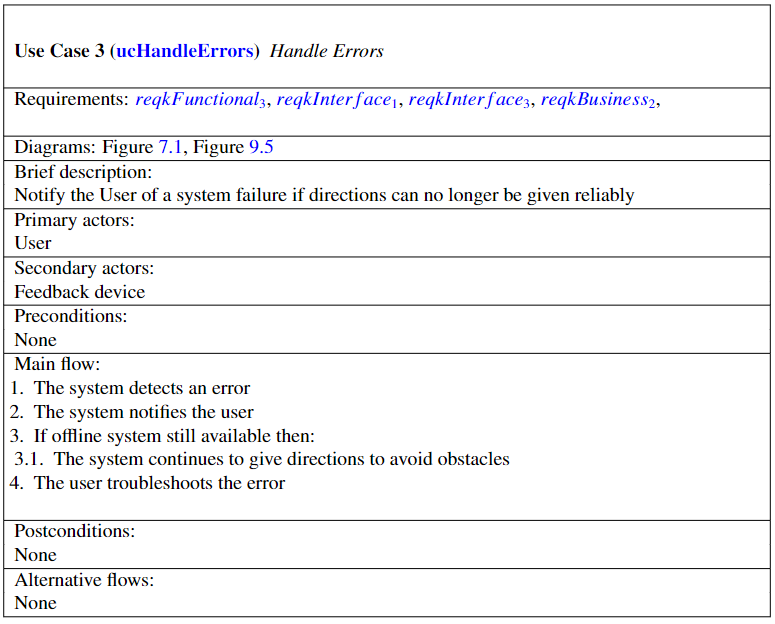
Safety Features
- Collision prevention
- Emergency stop protocols
- Battery monitoring
- System health checks
- Backup navigation modes
Safety Systems
Performance Analysis
- Navigation accuracy metrics
- Response time measurements
- Battery life optimization
- System reliability tests
- User feedback integration
Performance Metrics
Future Developments
Planned enhancements include:
- Enhanced object recognition
- Improved battery efficiency
- Expanded environment mapping
- Multi-user support
- Cloud-based data processing
- Integration with smart building systems
Project Repository
You can find the full project on GitHub.
Project Gallery